Featured events

Connect for Change 2024 - Global Service Day

Earth Day- Borrow your free reusable cup

ADVENTURE AWAITS Join Our Exciting 360° VIDEO SCREENING & WORKSHOP!
CBE colloquia
- Biomineralization-inspired Transdisciplinary Studies from Materials to Biomedicine

Department of Electronic & Computer Engineering - ECE FUTURE LEADERS PG SEMINAR SERIES

Department of Mathematics - Mathematics Colloquium
- Information Geometry:Geometric Science of Information

Economics Webinar
- Optimal Spatial Emission

Encounter with City’s Talent – German Romanticism

FINTECH THRUST SEMINAR | Financing the Newsvendor through A Captive Finance Company

Friday Dreamer Series: Turn Passion into Business 1M Special - Augmented Reality Hands-on Workshop
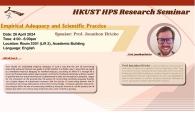
HPS Research Seminar - Empirical Adequacy and Scientific Practice
History and Philosophy of Science Research Seminar
- Empirical Adequacy and Scientific Practice

IAS / School of Science Joint Lecture - Molecular Basis of Wnt Biogenesis, Secretion and Ligand Specific Signaling
Joint OM/IE Seminar
- Size Substitution and Fairness in Assortment Optimization
Marketing Research Seminar Series
- Decision-Induced Preference Modulation: An Inference Account and the Differential Impact of Choose versus Reject Framing
Physics Department - Quantum Magnets studied with µSR
Physics Department - Quantum metrology with entangled spins and squeezed light in large ensemble of atoms

CREATE & BIND - Book Binding Workshop
Department of Mathematics - Seminar on Applied Mathematics and Statistics
- Information Beyond Shannon
Department of Mathematics - Seminar on Applied and Mathematics and Statistics
- Information Beyond Shannon

Global Service Day - EMbark a journey @HKUST 陪「里」遊科大

Global Service Day - PHAB Friendship 天弱有情

HKUST Garage Sale and Market 2024

Shenzhen InnoX Mini Camp @ HKUST

15 Minutes of Fame - Darin CHAU

Computer Science and Engineering Distinguished Seminar
- "Research and Application of Artificial Intelligence in Pathological and Genomic Computing"
Department of Chemistry - PhD Student Seminar - Evaluation of MXenes in field of energy storage
Department of Mathematics - Seminar on statistics
- Simultaneous Feature- and Sample-Splitting ADMM for Penalized Rank and Quantile Regression
Forum on New Direction of Management Science

H. G. Wells in search of China: Chinese intellectuals and the making of a universal history, 1919-1935

Humanities Seminar - “THE THEORETICAL ACCOMPANIMENTS TO AN ETHNOGRAPHER’S CAREER: Toward an anthropology for the 21st century?”
PhD Thesis Presentation
- Investigation of Organic Films for Amperometric Detection of Small Molecule Analytes

Sustainable Design Thinking Certificate Program

香港舞蹈團《舞韻中華》Elegance of Ancient Chinese Dances by Hong Kong Dance Company

Computer Science and Engineering Seminar
- "Data Reliability and Reduction Efficiency in Big Data Era"
Department of Chemistry - PhD Student Seminar - Unraveling Protein Evolution: Synonymous and Nonsynonymous Mutations Unveiling Molecular Adaptation

Global Service Day - Senior Scavenger Hunt 城市奪寶耆兵

HKUST MSc in Data-Driven Modeling - Expert Sharing Seminar by Dr. Chun ZHANG

InnoX Summer Camp 2024: Information Session and Product Design Workshop


Reimagine Fashion: A Journey of Integrated Study and Learning
nexus: Belonging Research Network - Chinese Muslim Heritage Literacy: Meanings and Adaptations

nexus: Belonging Research Network - Chinese Muslim Heritage Literacy: Meanings and Adaptations
“China in Maps: 500 Years of Evolving Images” Guided Tour (English)
Department of Mathematics - Algebra and Geometry Seminar
- Higher Segal spaces and algebraic structures

HUMA Research Seminar - Toleration or Respect?: The Zhuangizan Attitude toward Different Ways of Life

Humanities Seminar - “TIAN XIA IN THE KULA RING? An historical hypothesis about the structuring of one system into new circumstances.”

IAS Distinguished Lecture - Frustrated Lewis Pairs: Reactivity Across the Periodic Table

Piano Masterclass by Bruno CANINO
CBE Colloquia
- Rational Design of Catalytic and Energy Materials: from Computation Modeling to Experimental Validation
Department of Chemistry - PhD Student Seminar - Deep Learning Models for Peptide-protein Interaction Prediction
Department of Mathematics - Seminar on Pure Mathematics
- From two dimensional triangulations to three dimensional polyhedra
Economics Seminar
- The Macroeconomics of Firm Forecasts

FRIDAY SEMINAR SERIES - Opportunities and Challenges in Northern Metropolis Development

Friday Dreamer Series: Turn Passion into Business 1M Special - Allegrow Biotech Limited
HUMA Seminar - The Literary Lives of Yakshas in Pre-modern Chinese Literature: A Case Study

Master Class and Piano & Violin Recital featuring Bruno CANINO and Gian Paolo PELOSO

Piano and Violin Recital by Bruno CANINO and Gian Paolo PELOSO
西伯利亞的紅巫女 Red Witches in Siberia
Ongoing events

LinkedIn Learning at HKUST

Huawei ICT Competition 2023
- Computing Track
China in Maps: 500 Years of Evolving Images

Shaw Auditorium Unit Presents: Stamp Your Way to a Surprise - Spring 2024

Shaw Auditorium - Call For Proposals 2024

SENG Internship Survey – Spring 2023-24

Friday Dreamer Series: Turn Passion into Business 1M Special - Augmented Reality Hands-on Workshop

Call for Application – HK Express “Gotta GO! Sustainable Explorer Challenge 2024”
Call for Applications: HKUST-KTH Global Knowledge Network Awards 2024
Call for Proposals – Frontier Technology Research for Joint Institutes with Industry
Non-HKUST organized events
These are events hosted by non-HKUST organizers such as the Government, that the University is helping to promote.

Huawei ICT Competition 2023

2024海峽兩岸暨港澳地區大學生電腦創新作品賽

The 2nd City I&T Grand Challenge Hong Kong
百度「文心杯」創業大賽 第二季

Artificial Intelligence for Teaching & Learning
